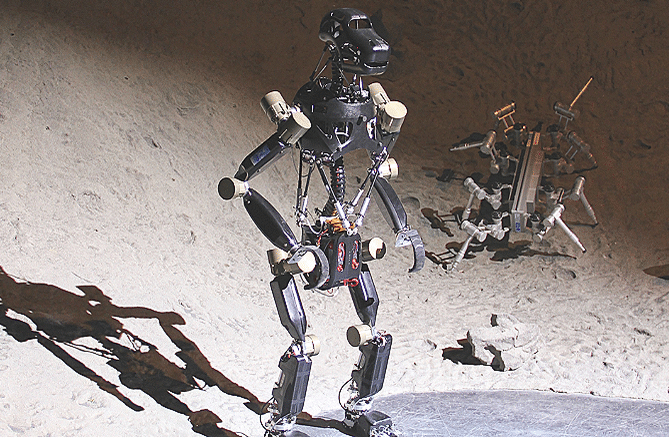
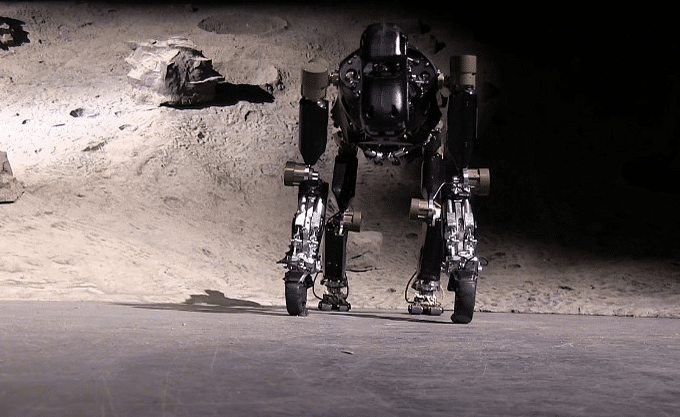
There are many stories about sending robots into outer space and think to yourself, “needs more apes,” Charlie the moon-exploring Robo-Chimp should be just the thing to make your day. The German Research Center for Artificial Intelligence (known as DFKI in Germany) has modeled a robot design on the chimpanzee, betting that imitating the animal’s versatile range of movements will prove ideal for the wide range of tasks required on an unmanned lunar mission. The prototype is technically called the iStruct Demonstrator, but the scientists have nicknamed it “Charlie,” by checking the stability of ape’s in such a way the chimp climbs, its grasping power and moving over all types of terrain and also they are testing out its moon skills on artificial lunar craters in a lab “We chose the ape because it allows us to study several locomotion modes,” DFKI researcher Daniel Kuhn says The Biggest special attraction of chimp Is, that it can choose any form of movement best fits the situation. On the whole, the robot can walk up and down slopes of up to 20 degrees and it focuses on a sophisticated lower limb system that combines the torque and twist of the chimpanzee’s lower body. And, like a real chimp, the robot’s feet and hands have multiple sensors and multiple points of contact. The first-ever greatest benefit of Charlie is having an “actuated spine,” which reflects the backbone of a real ape, allowing the bot, per Kuhn, to require “much less activation for the knee.” The biologically inspired robot itself is an ideal test platform for the foot and spine structures. These structures can extend the already existing locomotion behaviors of a robot and are used contemporaneously as carrier and sensor systems. This way, different functionalities are united in one construction unit. Sensors include a pressure sensor array of 43 individual force-sensing resistor (FSR) sensors. It also has six additional FSR-sensors used for collision detection.
“Spectacular feature of chimp is that it walks around and carries its own weight — and it can carry 20 to 25 kg of additional weight.” “What you have is an animal that can stand on four legs, giving it stability, but can use its front two legs to manipulate objects,” Kuhn said. Conclusion The final goal of this project is to develop a robotic system with structural components effectively to improve the locomotion and mobility characteristics.